- Zuhause
- >
- Produkte
- >
- Vektor-Multirotor
- >



Vektor-Multirotor
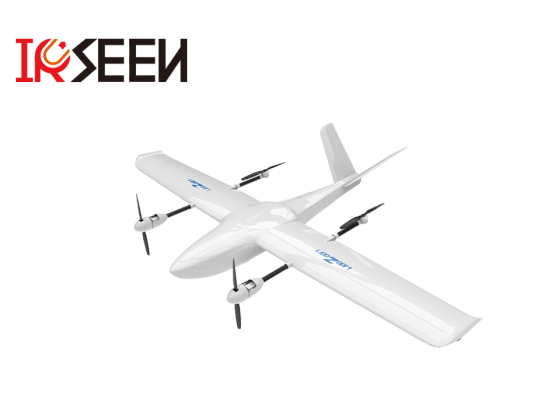
Das Multirotor-UAV ist mit einer extrem leichten Rumpfstruktur konstruiert, um die Festigkeit zu erhalten und gleichzeitig so viel Übergewicht wie möglich für Missionslasten und Batteriesysteme einzusparen, um die Leerlaufbetriebszeit zu verlängern.
- IRSEEN
- Shenyang, China
- Information
Vektor-Multirotor
Einführung
Das Multirotor-UAV ist mit einer extrem leichten Rumpfstruktur konstruiert, um die Festigkeit zu erhalten und gleichzeitig so viel Übergewicht wie möglich für Missionslasten und Batteriesysteme einzusparen, um die Leerlaufbetriebszeit zu verlängern.
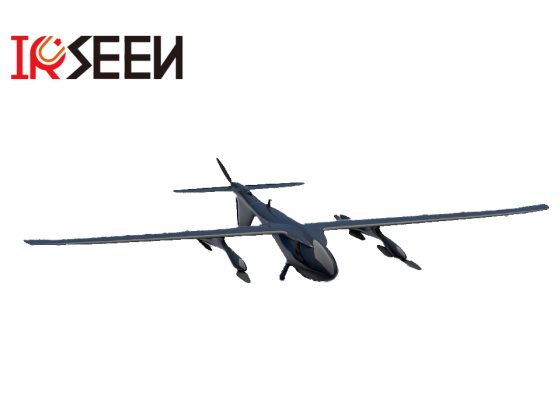
Das UAV-System besteht hauptsächlich aus einer UAV-Flugplattform, einem Missionsnutzlastsystem, einem Bodenstationssystem und einer Big-Data-Verwaltungsplattform im Hintergrund.
Das UAV wurde auf der Grundlage des modularen Designkonzepts entwickelt, das flexibel unterschiedliche luftgestützte Missionsausrüstung (wie z. Szene Anwendung.
Es ist klein und leicht und kann von einer einzelnen Person getragen werden, um die Inspektion des vorgesehenen Arbeitsbereichs abzuschließen.
Das UAV ist einfach zu bedienen, einfach zu installieren, flexibel, kann in kurzer Zeit eingesetzt werden und kann in einer Vielzahl von Luftmissionen wie Angriffspatrouille, Aufklärung und Suche weit verbreitet eingesetzt werden.
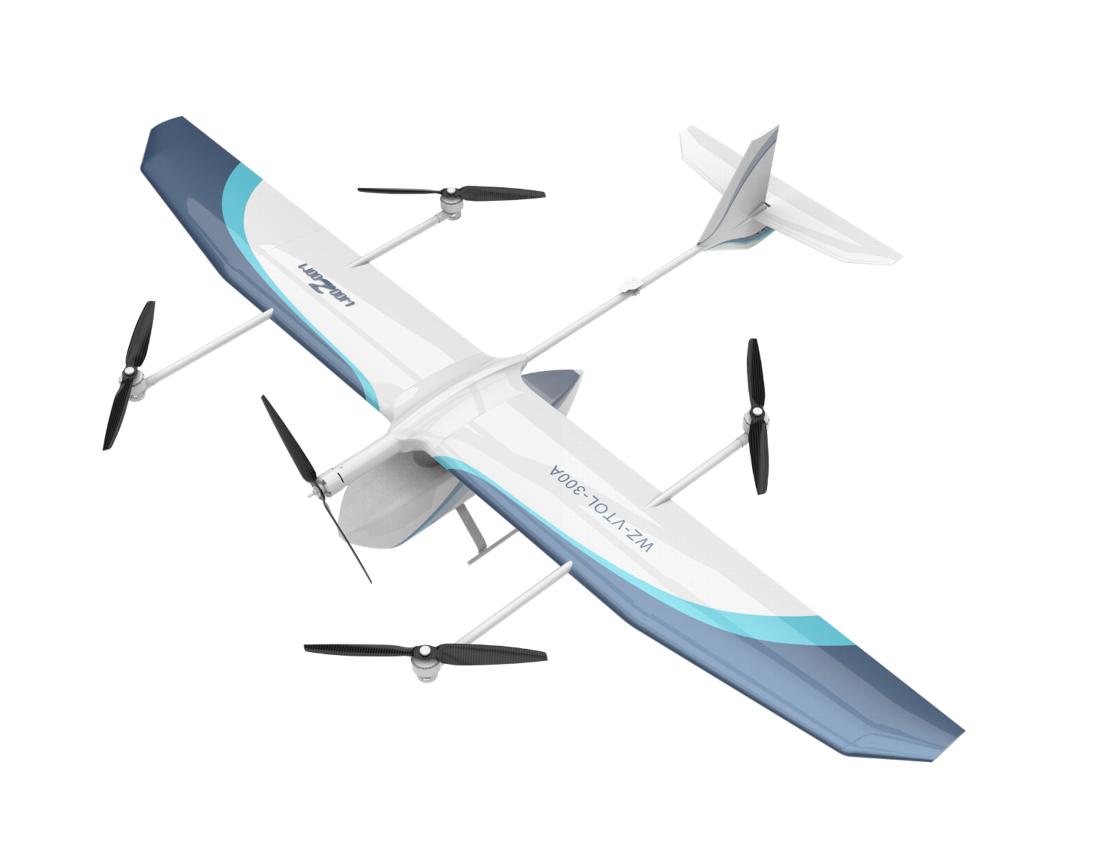
Funktionen
Maximale Größe 800 * 600 * 400 (mm)
Einsatzlast 5,2 kg
Schwebezeit 44min
Die maximale Flughöhe beträgt 2000m
Die maximale Höhe beträgt 5000m
GPS-Hover-Genauigkeit vertikal:±0,5 m horizontal±1,5 m
Parameter
Projekt | Parameter |
Rotordurchmesser | 381mm |
Körpergröße | 800 mm * 800 mm * 295,1 mm |
Leergewicht | 4,5 kg |
Nutzlast | 2kg |
Maximale Flugzeit | 30 Minuten |
Maximale Fluggeschwindigkeit | 20m/s |
Maximale Höhe | 4000m |
Aufgabenradius | 5km |
GPS-Hover-Genauigkeit | Vertikal±0,5 m |

NETD ist die rauschäquivalente Temperaturdifferenz der Infrarotkamera, die einer der Hauptindikatoren von Infrarotdetektoren ist. NETD ist ein objektiver Bewertungsindex für die Empfindlichkeit eines Wärmebildsystems und kann verwendet werden, um die Erkennungsentfernung eines Punktziels mit geringem Temperaturunterschied vorherzusagen. Der NETD-Wert der ZXIR-Wärmebildkamera liegt unter 50 mk....more